Voilà un moment que je voulais construire avec mon fils un robot humanoïde (ou presque) qui marche sur 2 pieds.
Un des critères est de pouvoir le faire avec les moyens du bord: sans pièces imprimée, sans mécanique de précision, sans servo couteux, sans kit mécanique hors de prix.
Lors de mes explorations sur le net, je suis tombé sur le projet de , « Ted the biped » de Stephen, sur Let’s make robots.
Parfait ! C’est l’inspiration qui manquait !!!
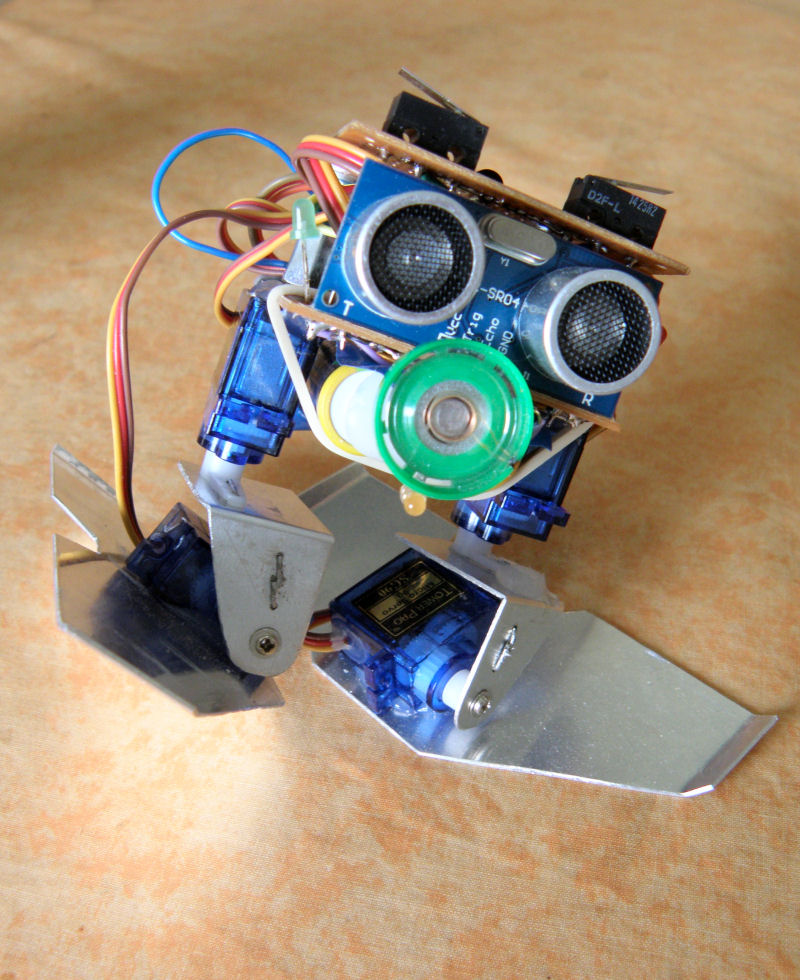
4 servos 9g (2€ pièce), quelques morceaux de tole alu et nous voilà partis à faire un clone de Ted à partir des descriptions, il s’appellera Seb.
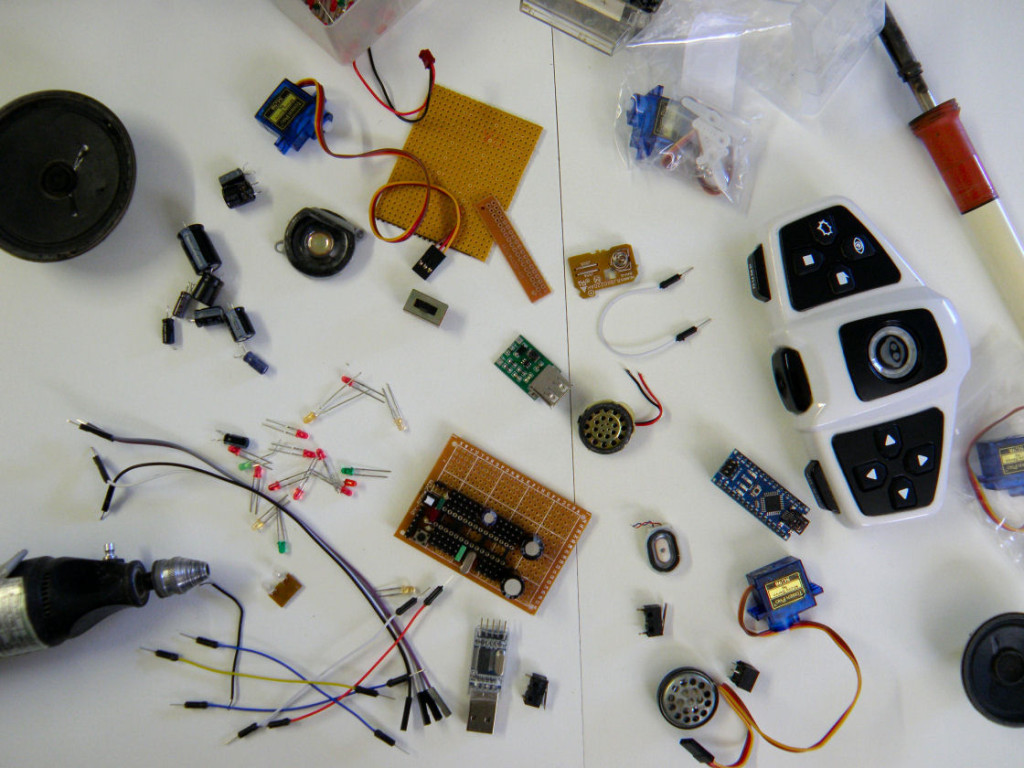
Quelques matériaux de base indispensables, pour tout robot « Frankenstein » qui se respecte:

Le module Baby orang outan du modèle
Ici, on ne pilote que 4 servos, pas besoin de driver moteur.
Nous partirons sur notre propre plateforme à base de Atmega328, plus adaptée pour piloter un maximum de servos. En contrepartie, on perd sans doute un peu d’espace à cause des broches inutilisées et du 328 au format DIP, mais ce n’est finalement pas trop grave.
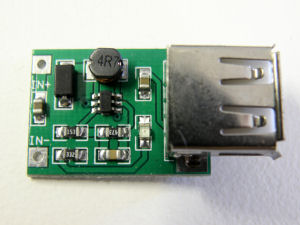
Le convertisseur DC-DC 5v
La solution ? Utiliser un module convertisseur DC-DC, bien plus léger qu’une pile, qui va nous fournir du 5v régulé (On verra lors des essais, que ça pose certaines contraintes, heureusement pas insurmontables)
On garde le module radar HC-SR04 (indispensable pour le look même s’il ne sert pas tout le temps à la navigation), des leds pour avoir un feedback visuel, le Haut parleur qui imite une bouche, ainsi que les microswitches à la place des sourcils, pour accéder facilement aux réglages.
Un capteur Infra rouge, sur le haut de la tête, est ajouté: il permettra de commander le robot via une télécommande de récupération.
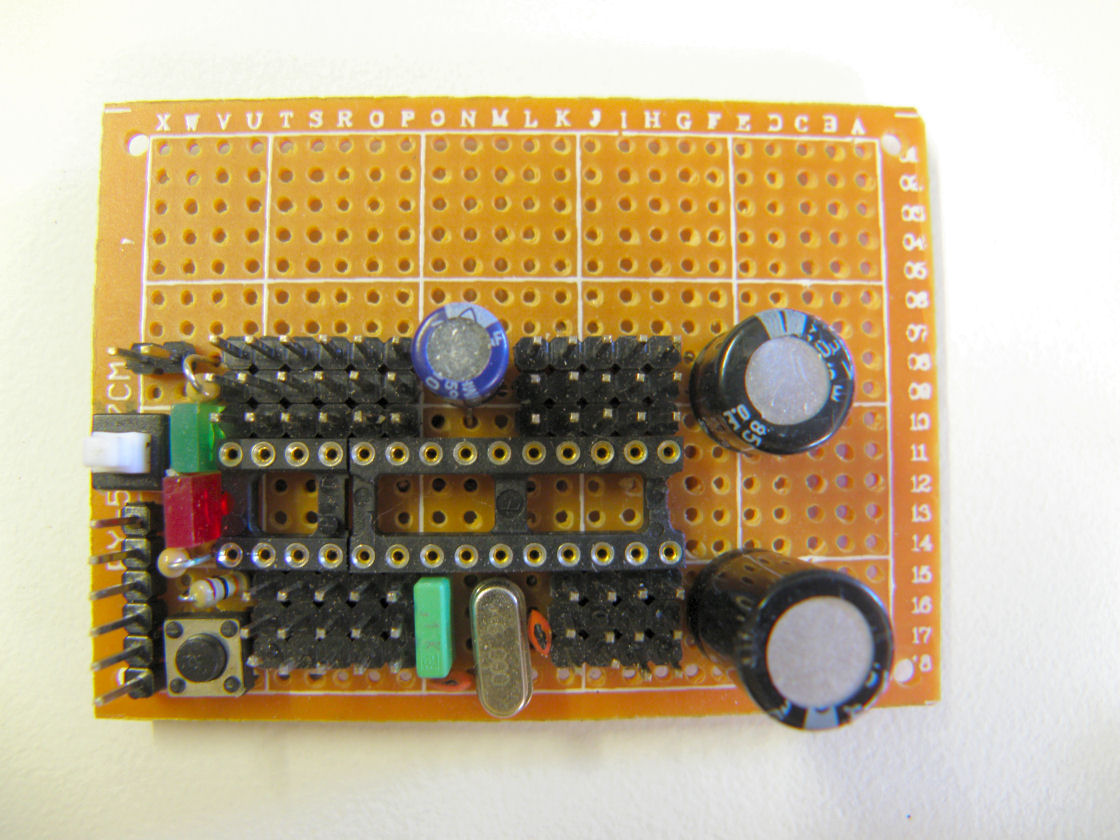
Notre carte maison, « Actuino-Servo »
On lui ajoute une deuxième plaque de même dimension pour « fermer » la tête de Seb.
Les fils n’auront qu’à bien se serrer pour tenir dans cet espace assez réduit (la hauteur est celle du capteur ultrason)